
Продукция



Сварочный робот
Уникальная конструкция манипулятора позволяет избежать гомогенизации продукта и эффективно сократить сингулярности в движении робота.
Описание
маркер
использовать:
Сварочный робот
Коллаборативные роботы серии Elfin могут использоваться в автоматизированных интегрированных производственных линиях, сборке, комплектации, сварке, шлифовке, покраске и других областях, успешно экспортируются в более чем 100 стран и регионов, включая Европу, США, Японию и Южную Корею. Коллаборативные роботы серии Elfin имеют уникальный дизайн двухшарнирного модуля, кинематический модуль содержит два шарнира, представляющих собой уникальную кинематическую структуру, не только по внешнему виду, но и более гибкую при работе. Уникальная кинематическая структура серии Elfin не только отличает ее от большинства других коллаборативных роботов на рынке с точки зрения внешнего вида, но и обеспечивает ей более высокую степень гибкости при работе.
Основные моменты:
Разработан для оптимизации сингулярностей:
Уникальная конструкция манипулятора позволяет избежать гомогенизации продукта и эффективно сократить сингулярности в движении робота.
Двойной шарнирный модуль:
Уникальная кинематическая структура обеспечивает Elfin высокую степень гибкости, эффективную интеграцию, модульную конструкцию и минимальный вес.
Гибкость 6 степеней свободы:
Коллаборативный робот с 4/6 круговыми осями для большей гибкости.
Модульность:
Самостоятельно разработанная редукционная машина, двигатели, кодовый редуктор, управление приводом и интеграция программного обеспечения.
Особенности продукта:
1.Самая высокая скорость связи: шина EtherCAT, скорость связи в 100 раз выше, чем у аналогичных устройств.
2.Самый безопасный: режим удерживающего тормоза, более безопасный и надежный, чем аналогичный, а смещение переключения составляет одну десятую от аналогичного, около 0,4 мм.
3.Самая высокая степень автономности основных компонентов: двигатели, сервоприводы и другие ключевые компоненты управляются независимо.
4.Удобное обслуживание: конструкция модуля с двойным шарниром, эффективность движения выше, а обслуживание удобнее.
Что такое сварочный робот:
Сварочный робот - это механическое оборудование для автоматизированной сварки, созданное с использованием технологий искусственного интеллекта, сенсорных технологий, коммуникационных технологий и т.д. Он обладает такими характеристиками, как высокая эффективность, низкая стоимость, четкий производственный цикл, высокий уровень автоматизации, стабильное качество продукции и т.д. Он широко используется в машиностроении, производстве автомобилей и автомобильных деталей, угледобывающей промышленности, муниципальном строительстве, нефте- и газопроводах, судостроении и т.д., для того чтобы Повысить конкурентоспособность продукции и защитить эффективность производства пользователей.
Сварочный робот в процессе сварки не требует участия человека, заготовки для автоматической сварки машин и оборудования, может быть использован для замены традиционной сварки, процесс сварки может быть достигнуто в процессе сварки для достижения стабильной сварки, повысить скорость сварки производственной линии, сварочный робот и традиционной сварки большая разница в том, что это интеллектуальная система управления.
Структурный состав сварочного робота:
1.сварочный источник питания: сварочные роботы должны иметь независимый источник питания, так что оборудование не запускается напряжение и ток нагрузки, чтобы защитить автоматический сварочный робот тела от повреждения.
2.механизм подачи проволоки: проволока через механизм подачи проволоки, чтобы достичь сварочного пистолета, стабильная скорость подачи проволоки способствует достижению стабильной сварки, скорость подачи проволоки может быть отрегулирована через кулон обучения, оператор должен быть скорректирован в соответствии с фактическими результатами сварки.
3.система управления. Система управления является важной частью сварочного робота, эквивалент человеческого мозга, может выдавать инструкции управления, шкаф управления с функциями ввода и вывода, сварочный рынок на этом этапе сварочный робот с помощью автономного программирования, оператор должен быть запрограммирован, а также вспомогательное оборудование программы в систему управления.
4.обучающее устройство: обучающее устройство оператором ручной работы, сварочный робот параметры сварки в обучающем устройстве для тонкой настройки, как правило, в зависимости от качества сварки корректировки 2-3 раза может быть.
5.корпус робота: сварочный робот корпус робота приводится в действие серводвигателями, шесть суставов для скоординированного движения, улучшить гибкость сварки, точные для обеспечения точности движения робота и траектории.
6.датчики: сварочный робот имеет внутренние датчики и внешние датчики, внутренние датчики для контроля работы корпуса робота, внешние датчики для контроля спецификации сварного шва и качества сварки.
7.Система защиты безопасности: в случае неправильного использования или повреждения корпуса робота, система защиты безопасности пошлет сигнал тревоги и остановит машину для проверки.
8.Сварочные приспособления: Зажимая заготовку, они улучшают точность сварки сварочного робота и уменьшают деформацию заготовки.
Роль сварочного робота:
Части сварочного робота сотрудничают друг с другом, чтобы завершить сварочные работы гибко, сварочный робот в основном используется в стальной конструкции, теплообменник, коробка, бак, трубопровод, фланец трубопроводной арматуры, автозапчасти и другие отрасли промышленности.
С развитием электронных технологий, компьютерных технологий, числового управления и робототехники, технология сварочного робота становится все более зрелой, в основном имеет следующие преимущества:
1.Стабилизация и улучшение качества сварки, которое может отражать качество сварки в виде числового значения.
2.Повышение производительности труда.
3.Повышение интенсивности труда рабочих, они могут работать во вредных условиях.
4.снизить требования к квалификации рабочих.
5.сокращение цикла подготовки к модификации и замене продукции и уменьшение соответствующих инвестиций в оборудование.


связаться с нами
Сопутствующие популярные продукты
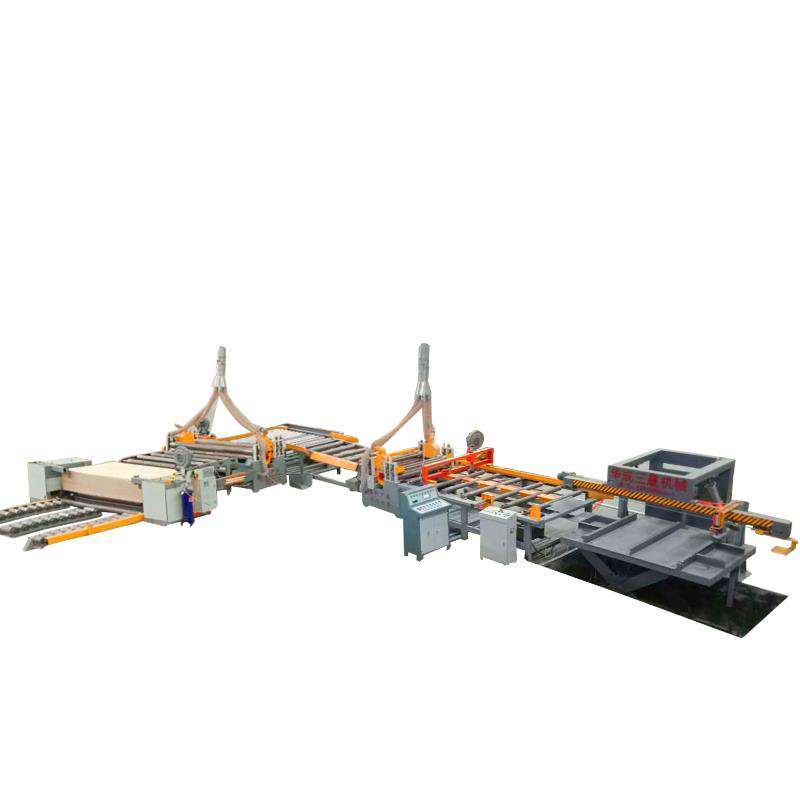
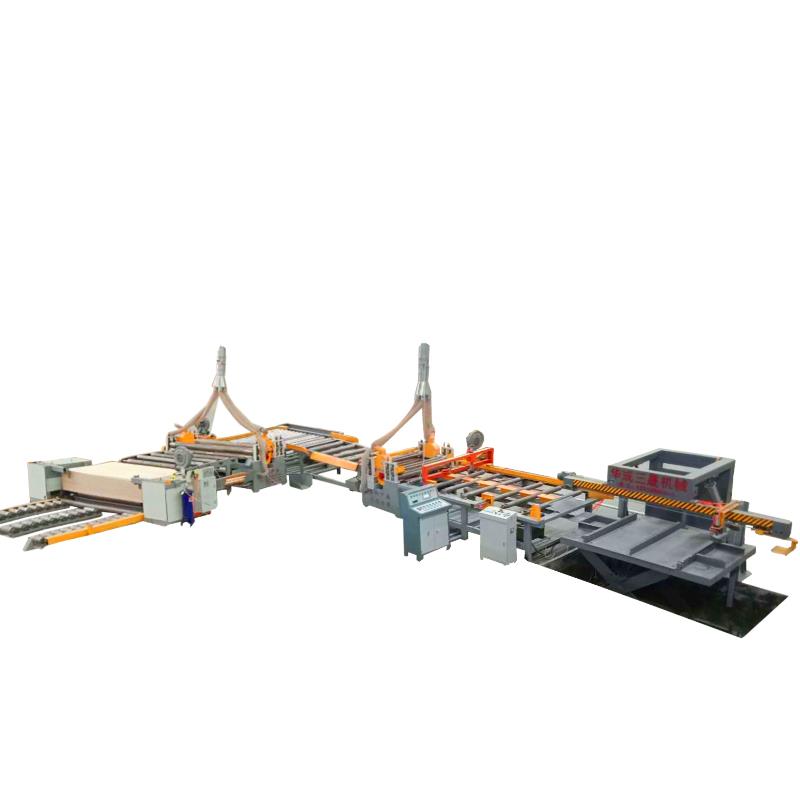
Автоматическая роликовая пила
Многофункциональный автоматический роликовый пильный стол, чем выше требования к доске, тем выше требования к автоматической пильной кромке.

двусторонняя плоскость
В конфигурации установлена централизованная система смазки, облегчающая смазку при обслуживании подъемной системы.

Деревообрабатывающий рубанок
Он подходит для строгания всех видов деревянных и искусственных досок. Древесная стружка хранится и выгружается, рабочая среда чистая и гигиеничная.